
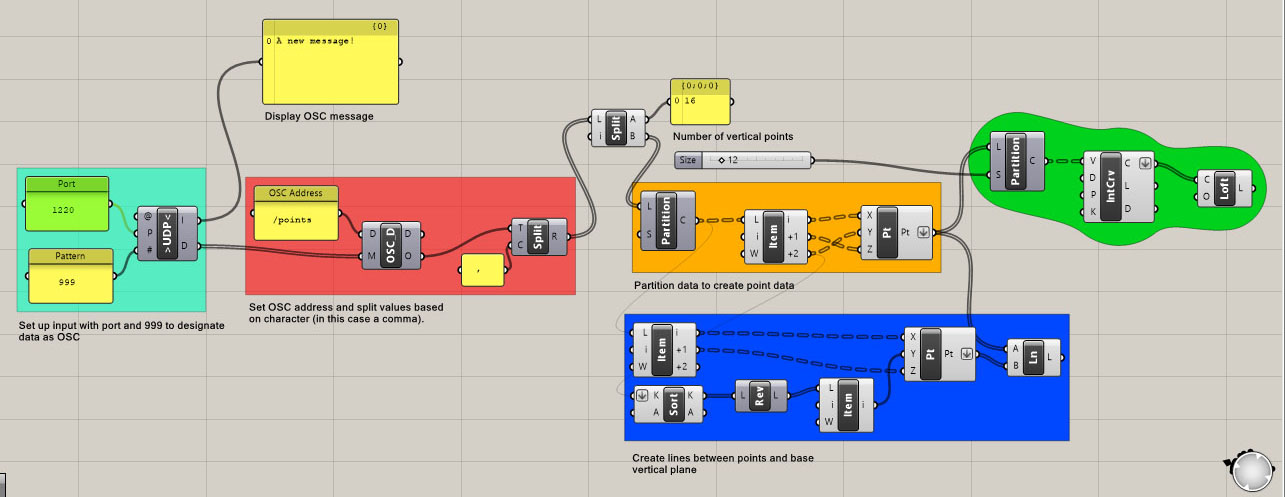
The definition above can be downloaded here: surface_pts.gh
import java.nio.*;
import KinectPV2.*;
import oscP5.*;
import netP5.*;
import controlP5.*;
NetAddress myBroadcastLocation;
OscMessage myMessage;
OscP5 oscP5;
ControlP5 cp5;
KinectPV2 kinect;
int vertLoc;
//transformations
float a = 1.9;
int zval = -200;
float scaleVal = 1;
//value to scale the depth point when accessing each individual point in the PC.
float scaleDepthPoint = 100.0;
//Distance Threashold
int maxD = 4000; // 4m
int minD = 0; // 0m
int Ztranslate = 0;
//openGL object and shader
PGL pgl;
PShader sh;
//VBO buffer location in the GPU
int vertexVboId;
ArrayList points = new ArrayList();
ArrayList zpoints = new ArrayList();
int oldx = mouseX;
int oldy = mouseY;
float rotx = PI;
float roty = 0;
float zcam = 500;
int initialize = 0;
int xstart;
int xclamp;
int ystart;
int yclamp;
boolean points_on = true;
boolean send_data = false;
PImage img;
public void setup() {
size(1280, 720, P3D);
perspective(PI/3.0,(float)width/height,1,100000);
oscP5 = new OscP5(this,6880);
myBroadcastLocation = new NetAddress("localhost",1200);
kinect = new KinectPV2(this);
kinect.enableDepthImg(true);
kinect.enablePointCloud(true);
kinect.setLowThresholdPC(minD);
kinect.setHighThresholdPC(maxD);
kinect.init();
sh = loadShader("frag.glsl", "vert.glsl");
cp5 = new ControlP5(this);
cp5.addSlider("minD")
.setPosition(40,40)
.setRange(0,4000)
.setSize(240,20)
.setValue(0)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addSlider("maxD")
.setPosition(40,80)
.setRange(0,14000)
.setSize(240,20)
.setValue(4000)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addSlider("Ztranslate")
.setPosition(40,120)
.setRange(0,1000)
.setSize(240,20)
.setValue(0)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addToggle("points_on")
.setPosition(40,160)
.setSize(20,20)
.setColorForeground(color(20,20,20))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(0xffff88ff)
.setColorActive(color(0,200,200))
;
cp5.addToggle("send_data")
.setPosition(80,160)
.setSize(20,20)
.setColorForeground(color(20,20,20))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(0xffff88ff)
.setColorActive(color(0,200,200))
;
cp5.addSlider("xstart")
.setPosition(340,40)
.setRange(-200,200)
.setSize(240,20)
.setValue(-18)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addSlider("xclamp")
.setPosition(340,80)
.setRange(0,100)
.setSize(240,20)
.setValue(46)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addSlider("ystart")
.setPosition(340,120)
.setRange(-200,200)
.setSize(240,20)
.setValue(-18)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
cp5.addSlider("yclamp")
.setPosition(340,160)
.setRange(0,100)
.setSize(240,20)
.setValue(46)
.setColorForeground(color(20,200,200))
.setColorLabel(color(255))
.setColorBackground(color(70,70,70))
.setColorValue(color(0,0,0))
.setColorActive(color(0,255,255))
;
PGL pgl = beginPGL();
IntBuffer intBuffer = IntBuffer.allocate(1);
pgl.genBuffers(1, intBuffer);
//memory location of the VBO
vertexVboId = intBuffer.get(0);
endPGL();
}
public void draw() {
background(0);
myMessage = new OscMessage("/points");
pushMatrix();
cam();
//draw the depth capture images
//translate the scene to the center
translate(0,0,-Ztranslate);
scale(scaleVal, -1 * scaleVal, scaleVal);
// Threahold of the point Cloud.
kinect.setLowThresholdPC(minD);
kinect.setHighThresholdPC(maxD);
//get the points in 3d space
FloatBuffer pointCloudBuffer = kinect.getPointCloudDepthPos();
points = new ArrayList();
zpoints = new ArrayList();
// obtain XYZ the values of the point cloud
for(int i = 0; i < kinect.WIDTHDepth * kinect.HEIGHTDepth; i+=3){ float x = pointCloudBuffer.get(i*3 + 0) * scaleDepthPoint; float y = pointCloudBuffer.get(i*3 + 1) * scaleDepthPoint; float z = pointCloudBuffer.get(i*3 + 2) * scaleDepthPoint; if(points_on == true){ stroke(255); }else{ stroke(0); } if((x > xstart && x < xstart + xclamp) && (y > ystart && y < ystart+yclamp) && x != 0) {
stroke(0,255,255);
points.add(new PVector(x,y,z));
}
strokeWeight(2);
point(x, y, z);
}
int sp = 3;
int part = (xclamp)/sp+1;
myMessage.add(part);
println(part);
for (int xx = xstart; xx < xstart + xclamp;){
for (int yy = ystart; yy < ystart + yclamp;){
int clz = 0;
float mind = 99999;
for(int i = 0; i < points.size(); i++){
PVector pt = points.get(i);
if(dist(xx,yy,pt.x,pt.y) < mind){
mind = dist(xx,yy,pt.x,pt.y);
clz = i;
}
}
if(mind != 99999){
PVector fpt = points.get(clz);
zpoints.add(new PVector(xx,yy,fpt.z));
}
yy = yy +sp;
}
xx = xx + sp;
}
for(int i = 0; i < zpoints.size(); i++){ PVector pt = zpoints.get(i); stroke(255,0,0); strokeWeight(3); point(pt.x,pt.y, pt.z); if(send_data == true ){ myMessage.add(pt.x); myMessage.add(pt.y); myMessage.add(pt.z); } } println(zpoints.size()); //begin openGL calls and bind the shader popMatrix(); oscP5.send(myMessage, myBroadcastLocation); } void cam() { int newx = mouseX; int newy = mouseY; translate(width/2, height/2,zcam); rotateY(rotx); rotateX(roty); translate(0,0,-30); //rotateZ(PI); if ((mousePressed == true) && (mouseY > 200) ) {
rotx = rotx + (oldx-newx)/50.0;
roty = roty + (oldy-newy)/50.0;
}
if(initialize == 0){
rotx = rotx + (oldx-newx)/50.0;
roty = roty + (oldy-newy)/50.0;
initialize = 1;
}
oldx = newx;
oldy = newy;
}
void mouseWheel(MouseEvent event) {
float e = event.getCount();
zcam = zcam - e*5;
}